
引言
无人扫雷车是用于地雷场中开辟通路的装有扫雷器的坦克装甲车辆,作为战时或战后有效地清除地雷的重要工具,针对无人扫雷车的故障诊断技术尤为重要。它的液压系统作为车辆的传动装置,具有结构复杂、非线性时变信号强、振动传递机制复杂等特点[1]。由于无人扫雷车作业时长时间受到地雷爆炸的冲击,使得液压元件极易出现故障,对故障的诊断往往较为困难。
针对液压系统故障难以诊断的问题,欧阳琦等[2]利用麻雀算法优化eXtreme Gradient Boosting(XGBoost),以注塑机液压系统为例进行故障诊断,提升了XGBoost对单液压系统故障诊断的准确率,证明了麻雀算法优化XGBoost模型在液压系统诊断领域的可行性;徐博涵等[3]利用粒子群优化算法优化XGBoost的超参数,提升了XGBoost 回归模型对数据拟合的效果,验证了粒子群算法对超参数优化的有效性,但是并未对粒子群算法易陷入局部最优的问题进行讨论;陈超泉等[4]使用分段线性混沌映射对海鸥算法的种群进行初始化,使海鸥个体更为均匀地分布,并在算法中融合麻雀算法的飞行机制,加快了算法收敛速度,最后与灰狼优化算法等元启发式算法作对比,证明了采用混沌映射对种群初始化可以明显提高算法的寻优效率。
由于无人扫雷车工作环境复杂多变以及涉密性原因,导致故障数据以及工况数据获取难度较大。因此,本文基于集中参数和物理元件数学模型,建立了无人扫雷车液压系统故障仿真模型,以仿真得到的故障数据构成诊断数据集,克服了以往数据量不足的问题。利用Piecewise混沌映射和柯西变异策略改进的淘金优化器算法(Piecewise chaotic mapping and Cauchy mutation of gold rush optimization algorithm,PCGRO)对XGBoost模型的迭代次数、树的深度和学习率进行优化,实现了扫雷车液压系统的故障分类诊断,并验证了诊断算法的可行性。
1 PCGRO⁃XGBoost模型
1.1 XGBoost算法
极限梯度提升 (XGBoost)的理论基础是分类和回归树理论[7],它能够有效地解决回归和分类问题,属于集成学习模型。XGBoost利用前向分布算法逐步优化基学习器,且每个基学习器都是一棵回归树。XGBoost目标函数如下。
式中, 表示第i个样本的预测值,xi 表示第i个样本的特征值。
XGBoost的前向分步算法采用的是贪心策略,如优化第t棵回归树,得到式(2 )、(3 ),其中式(3) 为基学习器公式。
式中, 表示损失之和, 为正则化相, 为常量。
将目标函数进行细化,得到式(4) ,式(5) 为正则化公式。
式中, 为各个节点的确定值,T为叶子节点个数, 表示第j节点值的平方, 和 为超参数,用来控制惩罚力度。
将方程(5)代入方程(2)中得到公式如下。
将式(6) 中损失函数进行二阶泰勒展开后得到
式中, 分别为损失函数的一阶导和二阶导。
将以上公式进行整合,代入式(4) 得到
式中, 为最优叶子权重, 为最优化目标函数。
在XGBoost中增益公式为
为了得到最优的节点划分,在一个节点分裂时,将分裂前的损失 减去分裂后的损失 得到增益值,增益值越大代表下降得越多,当前的划分也就越好。选取增益最大的划分,即当前最优划分。
1.2 淘金优化器算法
淘金优化器算法(gold rush optimizer,GRO)是Zolfi[8]提出的一种基于人口的元启发式算法,即淘金者通过迁移开采(挖掘)和协作的方法来寻找最佳的金矿位置。具体步骤如下。
1)迁移
当一个区域被发现有金矿时,该消息迅速传播,吸引大量的人来此处淘金,直至挖掘到最优质金矿的位置,即最优点。算法最开始生成初始淘金者位置并计算每个淘金者的适应度,取当前最优位置为全局最优位置,公式如下。
式中, 表示距离, 与 分别表示最佳金矿的位置和淘金者的位置, 为新的淘金者位置, 、 为向量系数, 为收敛分量, 为取值在 范围内的随机向量。
2)采金(挖掘)
当淘金者到达黄金矿区时,进行开采也就是寻优以发现更多的金矿,过程可表示为
式中, 、 和 分别表示随机选择的淘金者 的位置、淘金者 的位置和淘金者的新位置, 为向量系数, 为提高淘金者开采能力的收敛分量。
3)协作
在一个优质的金矿区,淘金者往往需要相互合作以获得最佳的利润,表示如下。
式中, 、 为两个随机选择的淘金者的位置, 为协作向量。
1.3 柯西变异策略
为了避免淘金优化器算法易陷入局部最优的问题,引入柯西变异策略对当前最优解进行扰动处理,增强种群的多样性和全局搜索能力,避免算法陷入局部最小值[9]。柯西变异来源于柯西分布,柯西分布是一种概率论中常见的连续型概率分布[10],其中间概率密度较大,两端概率密度小。由于柯西分布具有两端形状又长又扁的特点,使得柯西变异具有较强的扰动能力,能够使用较少的时间进行局部搜索,提高算法的寻优性能[11],有助于算法跳出局部最优解。柯西分布概率密度曲线如图1 所示。因此将淘金优化器算法与柯西变异融合,利用柯西变异对淘金者个体进行扰动,增强算法跳出局部最优的能力,从而提高算法的收敛能力。标准的柯西分布函数如式(20) 所示,更新最优解的数学模型如式(21) 所示。
式中: 为扰动后新的位置, 为当前最优位置, 为标准柯西分布函数。
1.4 Piecewise混沌映射
标准淘金优化器算法的初始位置为随机生成,极有可能使得多个初始点落在相距不远的位置,导致寻优效率低下。为解决淘金优化器算法的种群落点不均问题,提高算法的寻优效率,使用Piecewise混沌映射对淘金优化器种群进行初始化。Piecewise混沌映射的数学表达式如下。
式中, 为混沌系数,本文经实验仿真取 。
1.5 PCGRO算法性能测试
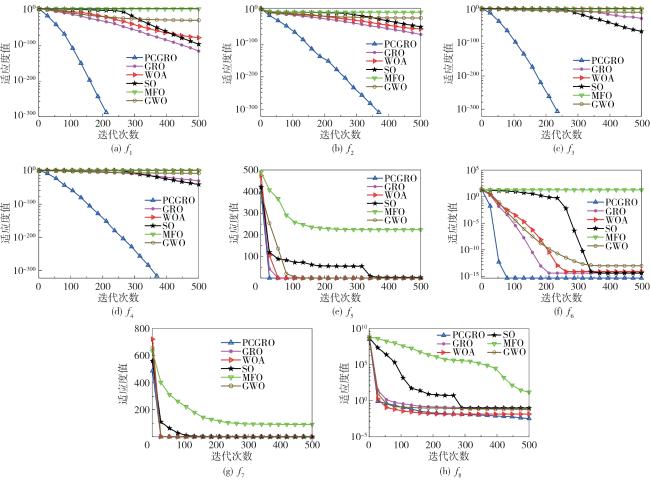
为了验证本文提出PCGRO算法的性能,本文选取了Congress on Evolutionary Computation (CEC)2005中8个常用的基准函数进行验证[8],如表1 所示,并与其他5种元启发式算法—GRO、鲸鱼优化算法(whale optimization algorithm,WOA)[12]、蛇优化算法(snake optimizer,SO)[13]、飞蛾扑火优化算法(moth‑flame optimization algorithm,MFO)[14]、灰狼优化算法(grey wolf optimizer,GWO)[15]—进行对比。将PCGRO算法与GRO、WOA、SO、MFO、GWO元启发式算法的种群规模均设置为30,迭代次数为500。
表 1 基准测试函数Table 1 Benchmark functions |
| 序号 | 函数 | 维度 | 范围 | 理论极值 |
|---|---|---|---|---|
| 1 | 30 | [-100,100] | 0 | |
| 2 | 30 | [-10,10] | 0 | |
| 3 | 30 | [-100,100] | 0 | |
| 4 | 30 | [-100,100] | 0 | |
| 5 | 30 | [-5.12,5.12] | 0 | |
| 6 | 30 | [-32,32] | 0 | |
| 7 | 30 | [-600,600] | 0 | |
| 8 | 30 | [-50,50] | 0 |
2 无人扫雷车液压系统仿真建模
2.1 液压系统工作原理
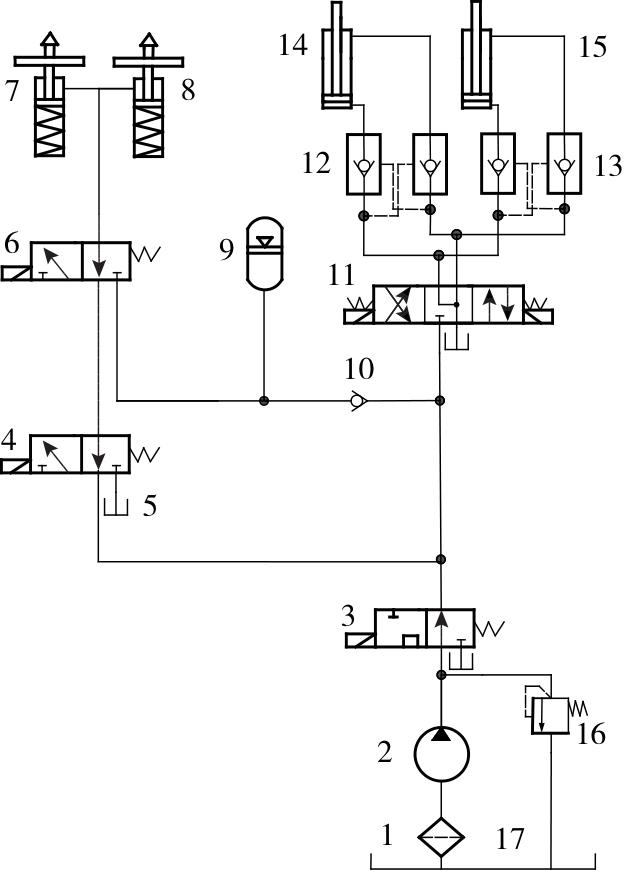
驻车和张紧液压系统是无人扫雷车液压系统的两个主要组成部分,由液压泵、过滤器、压力控制机构(溢流阀)、张紧电磁阀、张紧液压缸、驻车液压缸等组成。驻车和张紧液压系统有3种工作状态:①在扫雷状态时驻车液压缸缩回,张紧液压缸根据情况进行调整,并按照给定的速度向前推进,与整个液压行走系统一起完成扫雷工作;②在行驶状态时驻车液压缸回退,张紧液压缸伸出,使扫雷车快速行驶;③驻车状态时驻车液压缸因弹簧的复位而伸出,将车辆停止在原地。驻车和张紧液压系统原理图如图3 所示。
2.2 液压系统仿真建模
根据无人扫雷车液压系统运行原理对其进行仿真建模,由于该系统复杂以及涉密等原因,所以此处选用简化模型,如图4 所示。
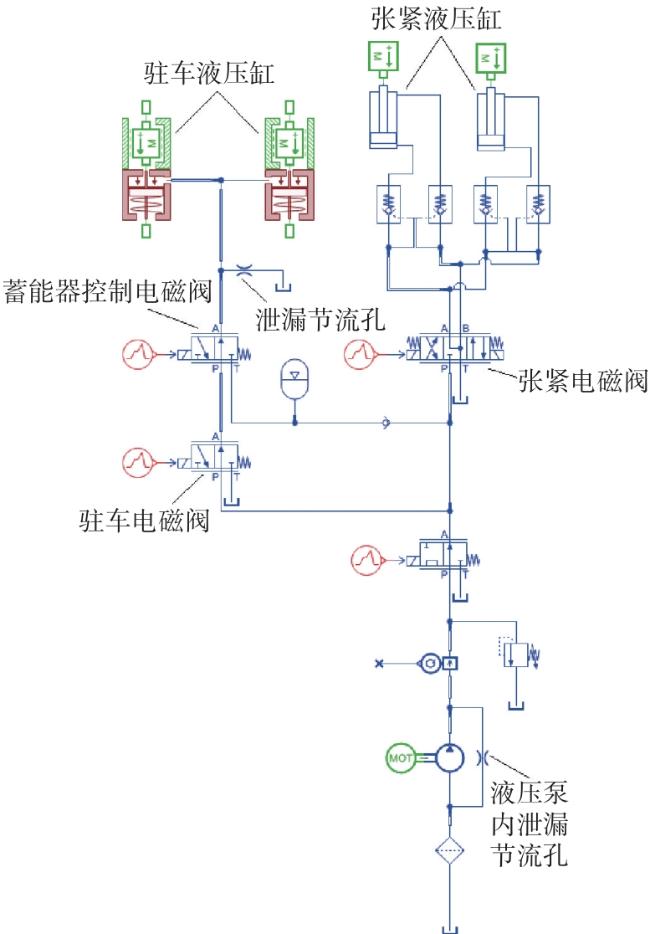
液压油经过液压泵加压之后输送到蓄能器、驻车油缸以及张紧油缸等各个部分,当张紧控制信号生效后,张紧电磁阀动作,张紧液压缸的活塞杆伸出,以达到张紧履带提高车速的效果。驻车制动部分与张紧部分类似,不同的是驻车液压系统有单独的蓄能器,蓄能器作为制动器松开应急动力油源,在主回路液压油失压的情况下提供至少3次能打开制动器的液压油。驻车和张紧液压系统主要仿真参数如表2 所示。
表2 驻车和张紧液压系统主要仿真参数Table 2 Main simulation parameters of parking and tensioning hydraulic system |
| 部件名称 | 参数 | 数值 |
|---|---|---|
| 液压泵 | 泵排量/(L·min-1) | 55 |
| 容积效率 | 0.95 | |
| 机械效率 | 0.95 | |
| 电机转速/(r·min-1) | 1 500 | |
| 驻车液压缸 | 液压缸缸径/mm | 125 |
| 活塞杆直径/mm | 70 | |
| 液压缸行程/mm | 20 | |
| 张紧液压缸 | 液压缸缸径/mm | 90 |
| 活塞杆直径/mm | 55 | |
| 液压缸行程/mm | 50 |
2.3 故障仿真
扫雷车在扫雷排爆时受到震动冲击会出现装配精度下降、密封件与其配件的相互磨损、液压油泵内泄漏等故障,发生故障时会产生多种类型的动态参数和信号,如压力、流量、位移等参量,各参数值反映了系统状态。本文选用常见的液压系统故障进行仿真,故障种类和仿真参数见表3 。
表3 故障分类表Table 3 Fault classification table |
| 标号 | 故障描述 | 参数设置 |
|---|---|---|
| 1 | 正常 | |
| 2 | 液压泵内泄漏 | 调节并联节流阀的节流孔大小为2~4 mm |
| 3 | 张紧电磁阀卡死 | 电磁阀的控制信号电流大小为-20~25 mA |
| 4 | 张紧液压缸内泄漏 | 调节张紧液压缸内泄漏系数为3~4 L/(min‧bar) |
| 5 | 驻车油路泄漏 | 调节油路中节流阀的节流孔大小为4~6 mm |
| 6 | 过滤器阻塞 | 调节过滤器孔径为2~2.5 mm |
1 bar=0.1 MPa。 |
对于液压缸内部泄漏,选择调节液压缸仿真模型中的泄漏系数来模拟;驻车油路外泄较容易被维修人员发现,但处于特殊位置则需要传感器的参数来反映其状态,本文通过在油路中添加节流阀来模拟驻车油路外泄;对于换向阀卡死故障,通过调节阀门的电流设定值来模拟不同的开关阻塞或退化状态;过滤器在液压油进入杂质时容易阻塞,通过改变过滤器孔洞来模拟阻塞故障。
选取的检测参数如表4 所示,将仿真时间设定为20 s,采样频率为50 Hz,正常工况下选取3组,每组1 000个数据点,其中两组为液压元件出现轻微老化泄露,但达到故障阈值。对于5种故障类别,分别从故障阈值区间内抽取3组、每组1 000个数据点共15 000个数据,共同组成故障分类诊断数据集。
表4 检测参数Table 4 Detection parameters |
| 序号 | 变量名称 | 单位 |
|---|---|---|
| 1 | 液压泵输出流量 | L/min |
| 2 | 液压泵输出油压 | bar |
| 3 | 张紧左液压缸无杆腔流量 | L/min |
| 4 | 张紧左液压缸无杆腔压力 | bar |
| 5 | 张紧左液压缸行程 | mm |
| 6 | 驻车左液压缸无杆腔流量 | L/min |
| 7 | 驻车左液压缸无杆腔压力 | bar |
| 8 | 驻车左液压缸行程 | mm |
1 bar=0.1 MPa。 |
2.4 仿真结果分析
液压系统出现故障会直观地反映在液压缸的伸缩速度和位移上。由于篇幅原因仅介绍当液压系统出现5类故障时张紧液压缸的变化曲线,如图5 所示。5种故障的参数分别是液压泵内泄漏并联节流阀的节流孔大小为2 mm,张紧电磁阀卡死控制信号电流大小为-20 mA,张紧液压缸内泄漏系数为3 L/(min‧bar)(1 bar=0.1 MPa),驻车油路泄漏节流阀的节流孔大小为4 mm,过滤器阻塞过滤器孔径为2 mm。
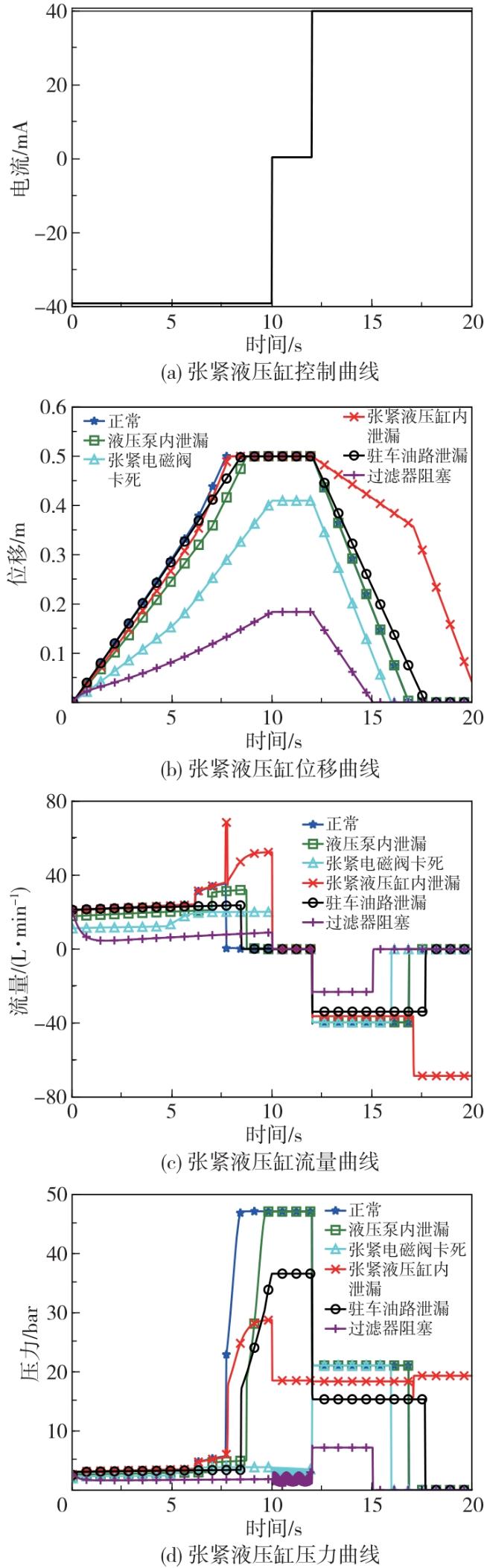
从张紧液压缸位移曲线(图5 (b))可看出,在液压缸发生内泄漏故障时,液压缸活塞杆的推出时间没有受到太大影响,而在执行退回操作时退回时间被延长,随着泄漏系数的增加可能发生无法退回的现象。驻车油路泄漏和液压泵内泄漏故障下的张紧液压缸动作时间稍微延长但是均未造成严重影响。在张紧电磁阀故障和过滤器阻塞故障下张紧液压缸在10 s内均未达到最大行程,原因为张紧电磁阀卡死会直接导致张紧液压缸无杆腔得不到足够的压力和油量。过滤器阻塞会使得这个系统的液压油不足,不仅是张紧液压缸受到影响,驻车液压缸也会受到影响。
由张紧液压缸流量图(图5 (c))可看出,张紧液压缸发生内泄漏故障时,在7.7 s液压缸到达最大行程和17 s液压缸缩回时,都有一个流量上升的波动,这是因为液压缸内泄漏时高压侧的液压油流入了低压侧。
从图5 (d)的张紧液压缸压力曲线可看出,当系统未发生故障时张紧液压缸在8.5 s时到达最大压力47.1 bar。在系统出现液压泵内泄漏故障时,张紧液压缸的无杆腔最大压力也达到了47.1 bar,但相比于正常工况到达最大压力的时间出现了滞后。在张紧液压缸发生内泄漏故障时无杆腔的压力出现大幅度降低,在液压缸缩回阶段,无杆腔的压力出现了增大的现象,这也是在液压缸退回的过程中有杆腔变成了高压侧,液压油进入低压侧的无杆腔造成的。
3 模型训练及结果分析
3.1 诊断模型训练
设置XGBoost模型的迭代次数、树的深度和学习率为PCGRO所要优化的参数。为兼顾模型的寻优精度和时间,设置PCGRO的种群数量为10,最大迭代次数为40,优化参数为3,构建PCGRO⁃XGBoost模型。将故障分类诊断数据集的80%作为训练数据,20%作为测试数据,以表3 确定的故障类型作为输出。
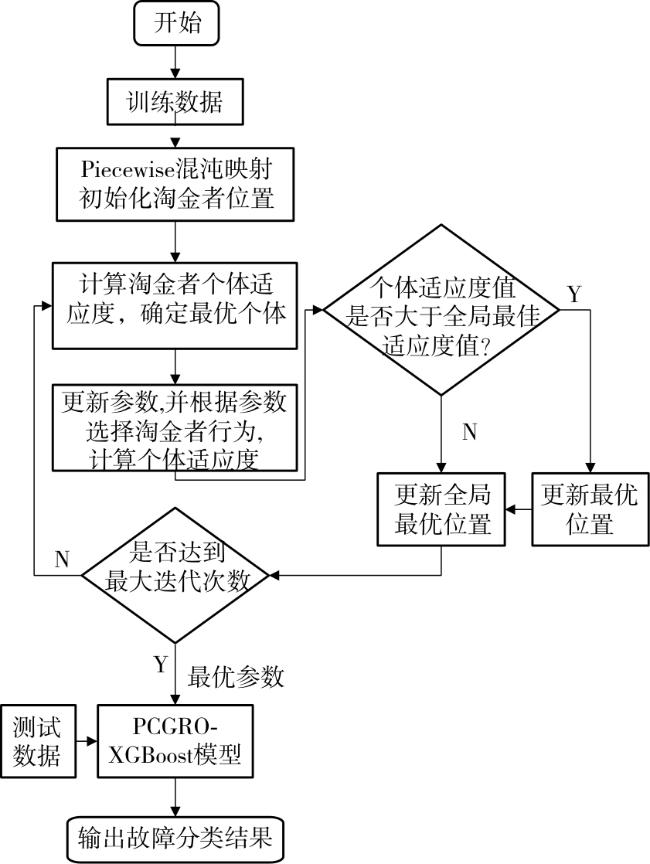
首先利用Piecewise混沌映射初始化种群,使算法具有更优的初始解;其次计算淘金者的个体适应度确定最优个体,判断该个体是否为最佳适应度,如是更新位置,如否则保留原来位置,如此循环直至达到最大迭代次数,此时输出当前最优位置向量,即为模型最优参数;最后将测试数据输入模型进行故障分类诊断。算法流程如图6 所示。
3.2 结果分析
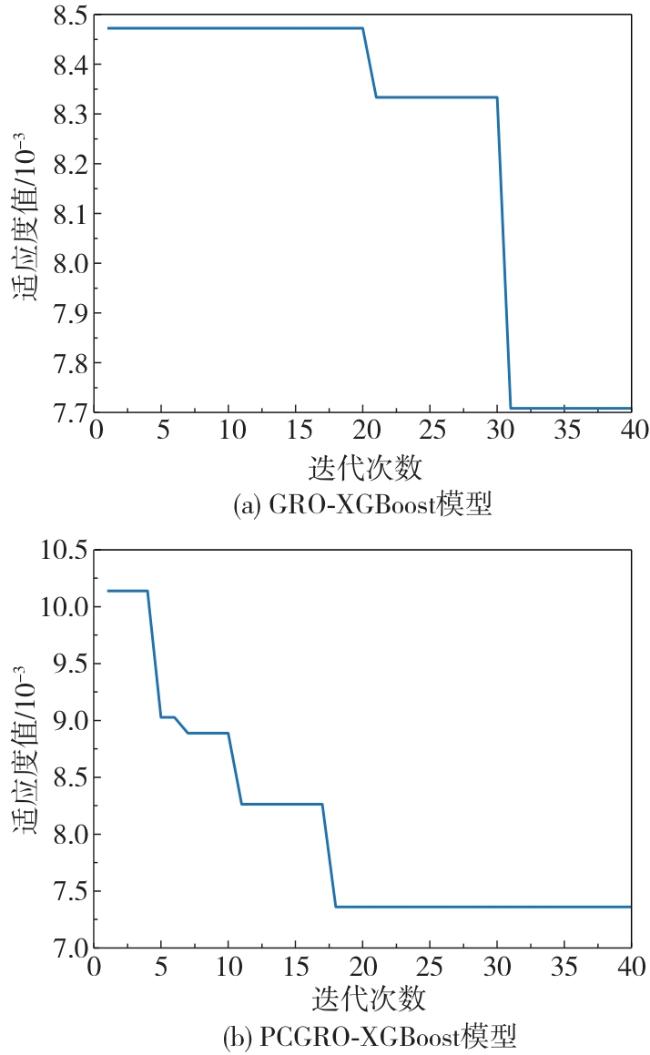
本文对比分析了GRO⁃XGBoost模型与PCGRO⁃XGBoost模型对无人扫雷车液压系统所涉5种故障的训练与诊断。从图7 的适应度曲线可知,在相同的最大迭代次数中GRO算法在迭代31次时达到适应度最低值 ,PCGRO算法在迭代18次时达到最低值 ,即PCGRO算法的适应度更低,说明在收敛时PCGRO的精度效果更好,且收敛更快。
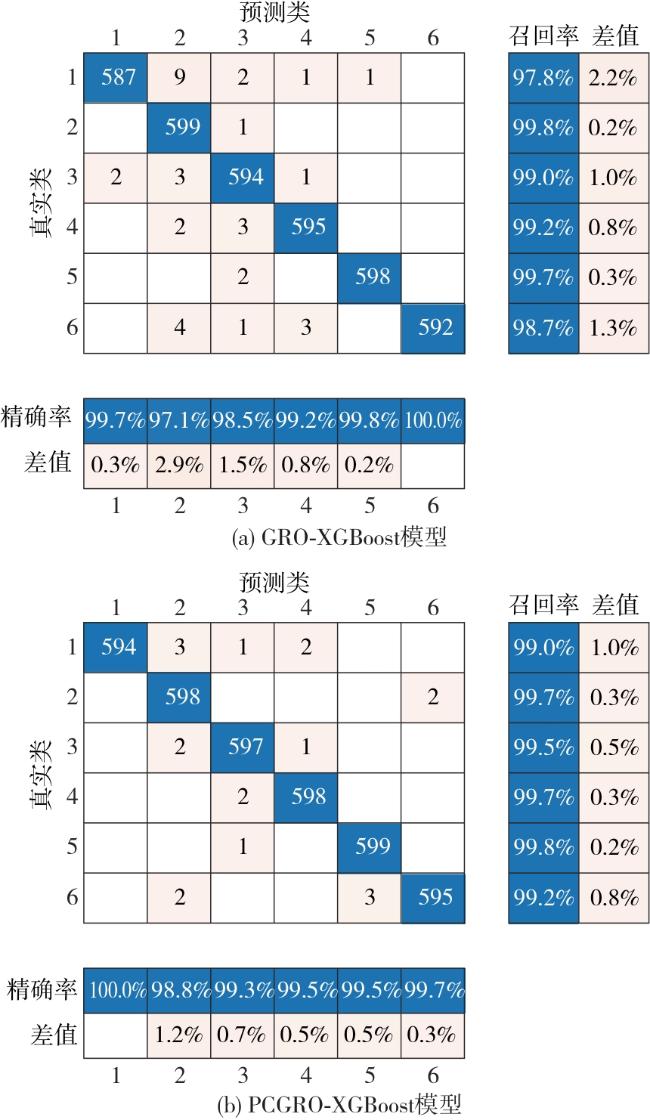
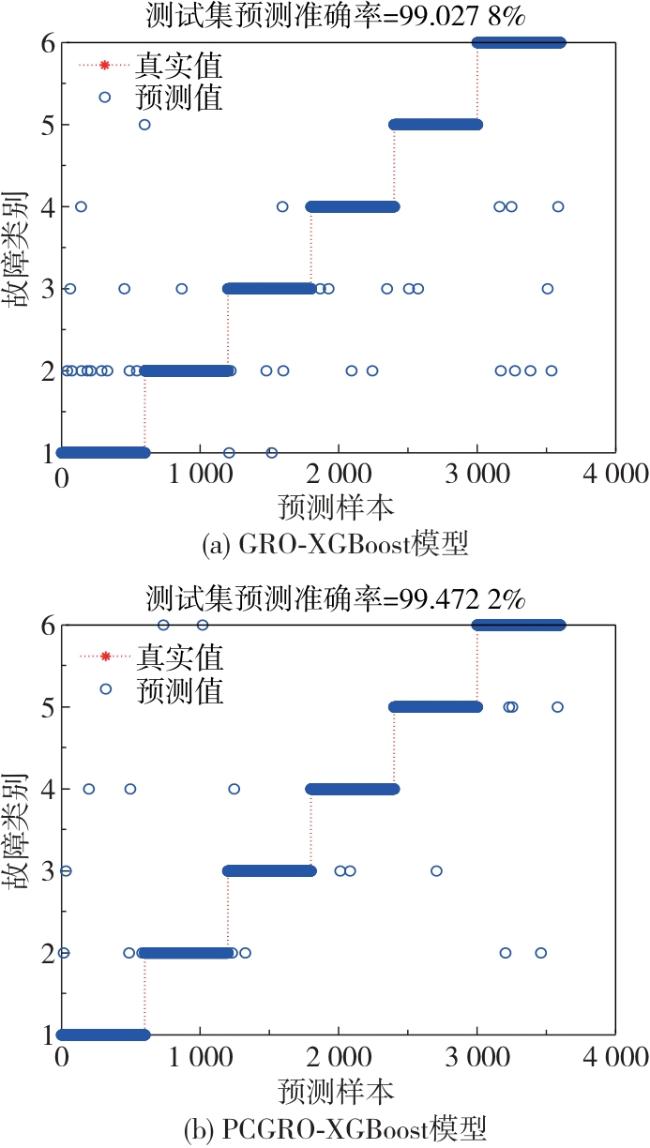
从图9 可知,GRO⁃XGBoost模型的分类诊断准确率为99.03%,PCGRO⁃XGBoost模型的分类诊断准确率达到99.47%。综上所述,PCGRO⁃XGBoost模型提高了无人扫雷车液压系统故障诊断的准确率,能够有效地对无人雷车液压系统故障进行分类诊断。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结论
本文建立了无人扫雷车液压系统仿真模型,为与实际相符调节了驻车和张紧液压系统仿真模型内部元件的参数,模拟了张紧液压缸内泄漏、驻车油路泄漏、换向阀卡死、过滤器阻塞和液压泵内泄漏5种液压系统故障,提取出故障数据构成数据集。针对无人扫雷车的液压系统故障种类多、隐蔽性强、常规的经验诊断方法难以有效诊断等问题,提出了PCGRO⁃XGBoost故障诊断模型。针对淘金优化器算法容易陷入局部最小值的问题,引入Piecewise混沌映射和柯西变异策略提升了算法的寻优效率。将仿真得到的故障数据输入PCGRO⁃XGBoost模型中,通过PCGRO算法的寻优能力得到XGBoost的最佳参数后对液压系统进行故障诊断,结果表明PCGRO‑XGBoost模型的寻优效率和故障分类诊断准确率均优于未改进模型,其故障诊断准确率达到99.47%,因此所提故障诊断模型能够很好地对无人扫雷车液压系统故障进行分类诊断。