
引言
随着计算机水平的发展和传感器技术的提升,基于机器学习的智能故障诊断方法成为目前研究领域的一个热点,其在诊断过程中减弱了专家经验的影响,更符合智慧电厂的应用环境[4]。该诊断方法的一般流程为提取信号的故障特征,采用监督学习或者无监督学习的分类器最终给出分类。许多学者利用机器学习方法在转子不平衡诊断方面做出了卓有成效的研究工作。文献[5-8]基于转子的故障类型和故障机理,利用经验特征提取和机器学习相结合的方法提高了故障诊断的精度。孙斌等[9]提出了一种基于局部切空间排列和k最邻近节点(k-nearest neighbor,kNN)的转子故障诊断模型。万周等[10]针对转子不同故障类型的诊断问题,提出了一种基于参数优化对称点模式分析的智能诊断方法,该方法通过卷积神经网络模型对时域信号在极坐标系的散点图进行分类,从而判别转子的故障状态。肖幸鑫等[11]利用互补经验模态分解结合支持向量机的方法对离心泵转子进行了故障诊断。钟志贤等[12]利用变分经验模态提取故障特征,采用模糊聚类分析判断不平衡状态,该方法可以识别变转速工况下的不平衡状态。Yan等[13]利用振动信号产生轴心轨迹图,并引入深度置信网络模型对多源异构信息进行处理和分类,来判断转子的不平衡状态,该方法通过轴心轨迹考虑了多数据源融合问题。
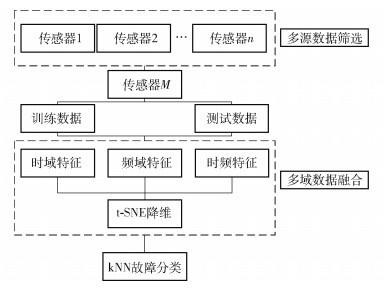
考虑到上述问题,本文提出一种基于多源域数据提取(multi-source domain data extraction, MSDDE)的高速转子不平衡故障诊断方法。首先,利用相关系数选取所有测点中的故障敏感测点,剔除冗余信息。然后,对故障敏感测点的振动数据进行时域、频域、时频域特征提取,构建高维混合空间;利用t分布的邻域随机嵌入(t-stochastic neighbor embedding,t-SNE)算法对高维特征数据进行降维和可视化。最终,采用kNN算法进行故障分类,实现故障智能识别。该算法能够有效地筛选多源测点信息,对采集的数据进行多域特征融合,从而综合智能地判断转子的故障状态。
1 多源域数据提取与机器学习算法诊断模型
1.1 多源数据筛选
1.2 多域数据融合
表 1 时域特征参数Table 1 Time domain characteristic parameters |
| 序号 | 时域特征 | 特征表达式 |
| 1 | 整流平均值 | |
| 2 | 方差 | |
| 3 | 峰值 | |
| 4 | 峰峰值 | |
| 5 | 有效值 | |
| 6 | 方根幅值 | |
| 7 | 峭度 | |
| 8 | 歪度 | |
| 9 | 裕度因子 | |
| 10 | 峰值因子 | |
| 11 | 脉冲因子 | |
| 12 | 波形因子 |
x为采集到的振动信号幅值,N为采样点数,σ为振动数据的标准差。 |
频域分析是对振动波形信号进行傅里叶变换,得到特征频率,根据故障的特征频率来判断设备的故障类型。频域特征是对振动信号的频域成分进行的统计学处理,特征指标见表 2 ,其中f1表征频域信号的平均能量;f2~f5主要表征频域信号能量的集中程度以及能量集中的位置;f6、f10~f13主要表征频域信号的频率谱功率收敛情况;f7~f9主要表征频域信号的频率的分布情况[21]。
表 2 频域特征参数Table 2 Frequency domain characteristic parameters |
| 序号 | 频域特征 | 特征表达式 |
| 1 | 频谱幅值样本均值 | |
| 2 | 频谱幅值样本方差 | |
| 3 | 频谱幅值偏度系数 | |
| 4 | 频谱幅值峭度系数 | |
| 5 | 平均频率 | |
| 6 | 频率均方根值 | |
| 7 | 频率方差 | |
| 8 | 主频带位置 | |
| 9 | 频率能量集中度 | |
| 10 | 变异系数 | |
| 11 | 频率偏度 | |
| 12 | 频率峭度 | |
| 13 | 标准化频谱均值 |
X(k)为频谱幅值,fk为频率,K为频谱的谱线数。 |
表 3 时频域特征参数Table 3 Time-frequency domain characteristic parameters |
| 序号 | 时频域特征 | 特征表达式 |
| 1 | IMF方差 | |
| 2 | IMF有效值 | |
| 3 | IMF峰峰值 |
1.3 数据降维与可视化
对振动信号提取12个时域特征、13个频域特征、9个时频域特征后并不能直接反映转子的不平衡信息,且高维度的特征矩阵增加了分类器的计算过程,容易导致分类器陷入过拟合状态。
数据降维是利用机器学习手段,得到一组可以表示高维度信息的维度较小的变量。振动信号本身具有非线性和非平稳性,对其提取后的多域特征之间也存在非线性关系。
t-SNE算法是一种非线性的降维算法,由随机邻域嵌入算法改进而来,SNE算法更关注于映射中数据的局部结构,容易陷入局部拥挤问题且优化困难。因此,Hinton等[24]于2008年提出了t-SNE算法,利用t分布取代原低维空间的高斯分布,通过这种方式减轻了拥挤问题。它构建了一个高维对象之间的概率分布,使得相似的对象有更高的概率被选择,因此在高维度空间中接近的类别,在低维度空间中也更靠近。式(2)表示低维空间中的联合概率分布函数qij,式(3)表示高维空间中的联合概率分布函数pij。
式中,yi、yj为低维空间中的任意点对,$\left\|y_l-y_k\right\|$ 为任意不同两点间的距离。利用KL散度评判高维度数据和低维度数据之间的分布差异,采用梯度下降法优化目标函数,如式(4)所示。
1.4 故障分类与辨识
t-SNE算法作为可视化和降维手段并不能对数据的类别进行判断,因此本文利用分类算法进行故障判别。t-SNE算法本身降维后的结果为高维数据分布的低维分布,在空间上相同的分布更靠近。kNN算法的原理是当预测一个数据的类别时,采用与它最近距离的k个样本点的类别来定义,这与t-SNE降维后的相同分布的数据点更靠近的原理较接近,因此利用kNN算法来定义t-SNE算法降维后的数据类别是合理的。kNN算法判断距离的公式为
根据多数投票原则在所述低维特征空间中找出与待测数据特征向量最接近的k个样本点。k值是kNN算法的超参数,应小于单个样本容量且大于1。t-SNE算法不同类别的空间分布更大,因此k值的选择可以较小,根据实践经验,k值选择单个样本容量的10%即可。
1.5 模型框架
基于多源域数据提取与机器学习算法的转子不平衡诊断模型的流程图如图 2 所示。首先,获取监测多个振动传感器的历史正常数据,计算各传感器历史正常数据与故障数据之间的互相关系数,选取相关度最小的传感器数据作为模型的监测数据源。然后,对该数据源的数据提取时域、频域和时频域特征,构建高维混合特征空间。最后,利用t-SNE算法对高维特征数据进行降维和可视化,在三维空间内采用kNN算法进行故障分类,输出故障类型。
2 实验验证
2.1 转子动力学实验
如图 3 所示,转子动力学实验台由高速电机带动换挡齿轮箱与实验齿轮箱组成。高速电机通过变频器控制,转速在0~3 000 r/min可调。换挡齿轮箱与电机通过膜片式联轴器连接,低速档变速比为1 ∶1.3,高速档变速比为1 ∶2.5。换挡齿轮箱通过膜片式联轴器与传动比1 ∶5.32的实验齿轮箱连接,实验齿轮箱高速轴设计转速0~30 000 r/min。

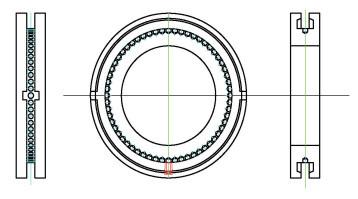
该高速轴轴端设计有两个配重轮盘,结构形式如图 4 所示。通过增加配重质量块来模拟转子不同的不平衡状态。实验齿轮箱分布有8个8 mm电涡流位移传感器,传感器采样频率5 000 Hz,采样点数5 000。用于采集低速轴与高速轴振动的传感器分布如表 4 所示。
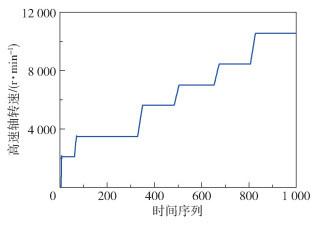
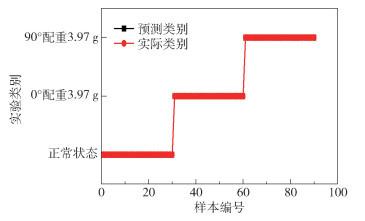
设计3个实验如下:实验一不增加配重质量块,转子本身动平衡等级为G1.0级,按照图 5 所示的高速轴升速曲线做升速实验,在各转速停留采集数据后进入下一转速;实验二在高速轴靠近电机侧的配重轮盘上的0°相位处增加3.17 g的配重质量块,按图 5 所示的高速轴升速曲线升速;实验三在高速轴靠近电机侧配重轮盘上90°相位(相对于0°相位沿轴旋转方向)处增加3.17 g配重质量块,按图 5 所示的高速轴升速曲线升速。
将实验一在8 460 r/min下7个振动传感器采集的某一组信号看作正常信号,选取实验二与实验三在8 460 r/min转速下的各10组振动信号作为测试信号,计算正常信号与这10组信号的互相关系数,并求取各传感器的互相关系数平均值,结果如图 6 所示。
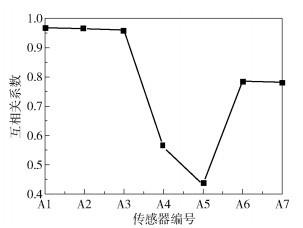
从图中可以看出,A5传感器采集的振动信号与正常状态下的正常信号互相关系数最低,即信号中存在的周期性频率更高,也就意味着其包含的故障信息更丰富。此外,本次实验二与实验三增加的配重质量块位于高速轴靠近电机侧的配重盘上,A4、A5传感器更靠近故障发生位置,因此其互相关系数远低于其他传感器。A6、A7为轴另一端的传感器,其互相关系数较高,A1、A2、A3为低速轴上的传感器,其互相关系数最高。由此可以看出本文提出的利用互相关系数筛选得到故障敏感测点的方法符合实际情况,所筛选数据更靠近故障发生位置,包含故障信息更多。
2.2 同转速工况下的不平衡诊断
2.2.1 常规频谱判断
在高速轴转速为8 460 r/min时,采集实验一数据、实验二数据、实验三数据各110组。选取3组实验中A5传感器的某一时刻振动信号进行频谱分析,结果见图 7 。
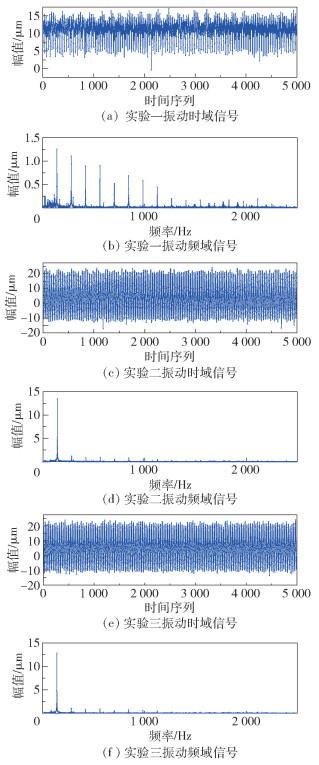
从图 7 可以看出,实验一与实验二、三之间振动信号差别较大,实验一振动峰峰值在20 μm,实验二与实验三振动峰峰值在30 μm。同时构成振动的主要频率分布不同,实验一的主要频率幅值较低,峰值未高于5 μm;实验二与实验三工频频率峰值为12 μm,是构成振动的主要特征频率,明显发生了不平衡故障,但实验二、三之间的频域波形一致。因此,常规频谱分析仅能判断实验二、三发生了不平衡故障,无法对不平衡故障的位置和相位进行判断。
2.2.2 基于t-SNE与kNN的模型诊断
选取实验一、二、三在8 460 r/min转速下的100组数据作为训练数据,提取时域、频域和时频域特征后,利用t-SNE算法进行降维。
如图 8 所示,训练数据经过降维后3种实验数据在空间中分割开来。利用kNN算法对测试数据进行故障分类,实验一测试数据被分类为正常状态,3种测试数据更靠近各自实验组别的训练数据区域。

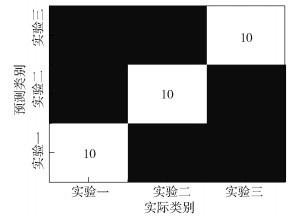
根据kNN算法,将30组测试数据进行分类,从分类后的混淆矩阵(图 9 )可以看出,分类的准确率为100%,即相同转速下的实验数据类别都可以准确识别。
2.3 不同转速工况下的不平衡诊断
对于有量纲参数,转速的变化会使数据产生较大波动。为验证模型对不同转速、不同不平衡质量的辨识有效性,设计了多转速、多不平衡质量的对比方案。该方案训练数据、测试数据的组成结构如表 5 、6 所示。
表 5 多转速多不平衡质量训练数据Table 5 Training data of multi-speed and multi-unbalance |
| 转速/(r·min-1) | 无配重 | 0°配重3.97 g | 90°配重3.97 g |
| 7 020 | 100组 | 100组 | 100组 |
| 8 460 | 100组 | 100组 | 100组 |
| 10 560 | 100组 | 100组 | 100组 |
表 6 多转速多不平衡质量测试数据Table 6 Test data of multi-speed and multi-unbalance |
| 转速/(r·min-1) | 无配重 | 0°配重3.97 g | 90°配重3.97 g |
| 7 020 | 10组 | 10组 | 10组 |
| 8 460 | 10组 | 10组 | 10组 |
| 10 560 | 10组 | 10组 | 10组 |
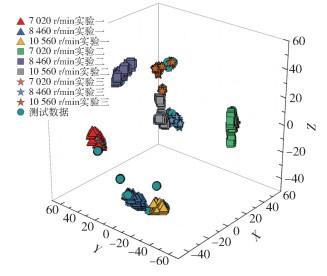
按表 5 、6 中数据结构提取900组数据后,计算特征并利用t-SNE算法降维与可视化。从图 10 中可以看出,“▲”代表的不同转速下的正常实验数据位于三维空间的左下方,3种转速之间有一定间隔;“■”代表的“0°配重3.97 g”位于三维空间的中部;“★”代表的“90°配重3.97 g”位于三维空间的右后方。从训练数据的分布状态中可以看出,相同转速的3种实验数据在空间中分开,而相同实验的不同转速数据互相靠近。利用kNN算法对3种不平衡状态进行训练,测试数据的分类状态如图 11 所示,对于不平衡状态的分类准确率为100%,表明本文提出的方法对转速并不敏感,融合后的多域特征表达了故障状态。
2.4 性能分析
为了进一步验证基于多源域数据与机器学习算法的高速转子不平衡故障诊断模型性能,设计实验与其他算法进行对比。
2.4.1 不同数据源之间的对比
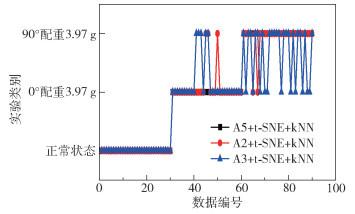
采集互相关系数较高的低速轴驱动侧传感器A2、低速轴非驱动侧传感器A3的振动数据,提取多域特征后进行t-SNE降维与kNN分类处理。不同数据源的分类识别准确度如图 12 和表 7 所示,可以看出A2、A3数据源的识别准确度低于A5数据源。由此可得出,多源数据的选择是影响模型准确率的关键性因素,本文提出的利用互相关系数来选择数据源进行分类的方法的准确率更高。同时,3组信号源对于正常数据均判断正确,对于故障数据的判别,A2、A3数据源对不平衡相位之间识别的判断较差。
2.4.2 不同分类算法之间的对比
对A5传感器采集的数据,提取多域特征值后采用随机森林算法、主成分分析(principal component analysis,PCA)+kNN算法进行分类。从图 13 和表 8 中可以看出,同数据源情况下,基于t-SNE与kNN算法的分类识别准确度高于其他两种算法,另外两种分类算法对不同不平衡状态之间的识别存在错误。
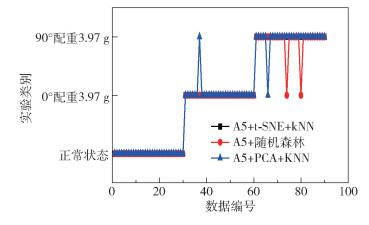
表 8 不同算法的分类识别准确度Table 8 Classification recognition accuracy for different algorithms |
| 分类算法 | 总体准确度/% | 正常状态识别为不平衡状态组数 | 不平衡状态识别为正常组数 | 不平衡状态之间识别错误组数 |
| A5+ PCA +kNN | 97.8 | 0 | 0 | 2 |
| A5+随机森林 | 97.8 | 0 | 0 | 2 |
| A5+ t-SNE+kNN | 100 | 0 | 0 | 0 |
2.4.3 参数敏感性分析
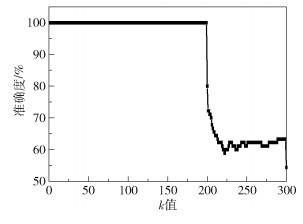
机器学习方法分类准确度容易受参数的影响,本文采用的t-SNE+kNN算法涉及到的参数有t-SNE算法的分类维度与kNN算法的k值大小。分类维度由于可视化要求一般选择2维或3维,经计算两种分类维度的准确率均为100%,因此可根据需求选取。对于k值的选择,本文推荐为样本容量的10%,一方面减小了计算复杂度,另一方面不会影响分类准确度。如图 14 所示,计算了k值从1到300时的分类识别准确度。可以看出,随着k值从1增至199,识别准确度并不随着k值选择而变化;当k值在200以上取值时,样本准确度逐渐下降。综合考虑计算复杂度与准确度,本文推荐k值选择为样本容量的10%。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3 结论
(1) 本文提出利用互相关系数来表征故障信息的丰富程度,解决了大型转子振动测点多、多源信息识别困难等问题。对多源数据筛选后,提取时域、频域和时频域特征,构造高维度的特征空间。利用t-SNE算法揭示高维数据在低维空间的分布,通过kNN算法实现故障的智能分类与诊断。对比其他数据源采集的信息,故障诊断准确率更高,证明该方法提取的数据源包含的故障信息更多。
(2) 提出的分类模型对不同转速、不同程度的不平衡量均有良好的识别效果。通过实验对比其他转子不平衡诊断模型,所提模型具有更高的准确率,能够识别不同转速下的不平衡故障,具有更好的鲁棒性。
本文提出的方法能够判断设备的不平衡故障,随着模型库的丰富,对不平衡质量与相位的识别可用于指导现场动平衡工作的开展。